MP3 sound control
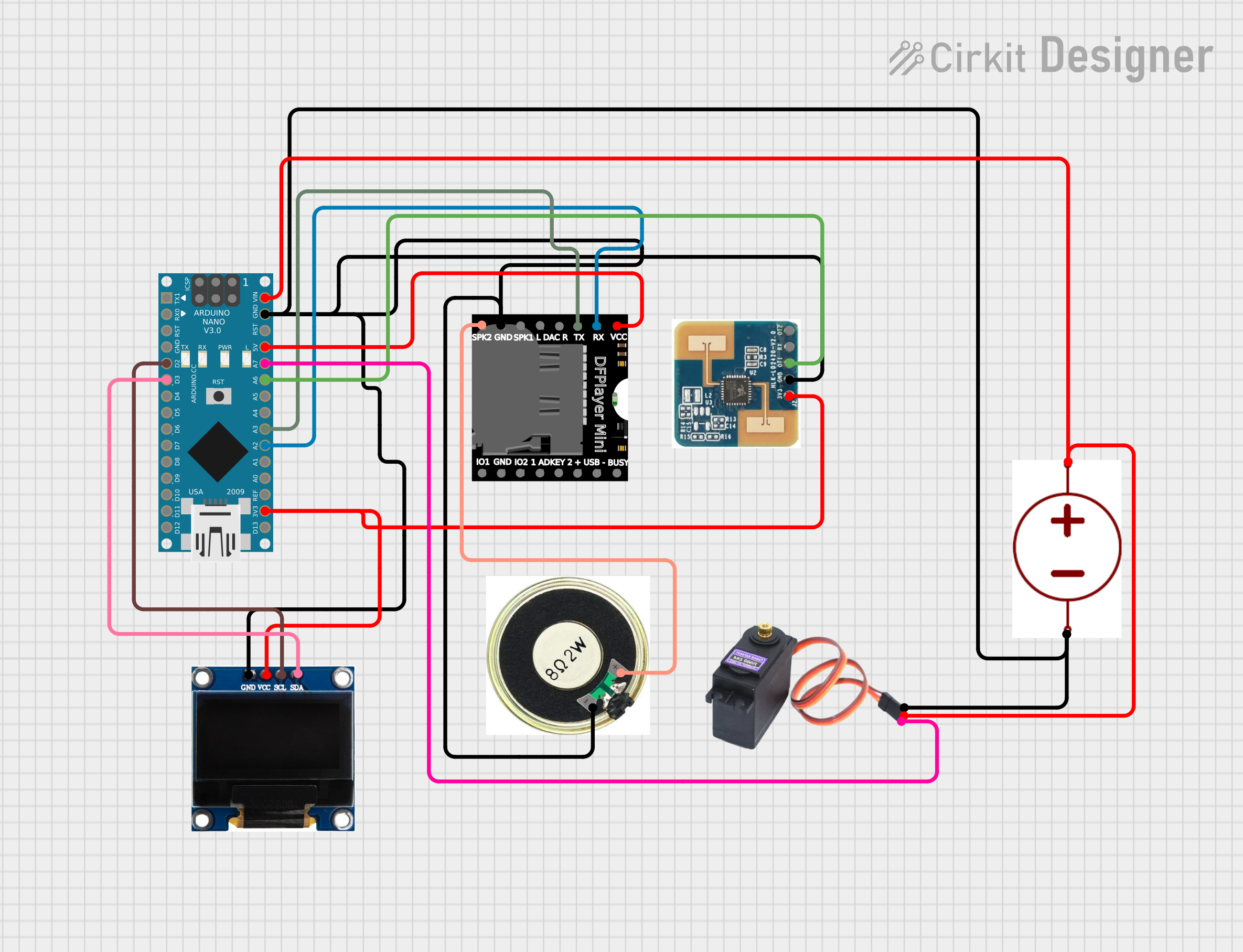
This simple project will use a mp3 player, a simple, recycled speaker, and arduino and a HLK-LD2420 human motion sensor to play sounds when a human walks past the device.
sketch code:
/*
* Arduino Sketch for Motion-Activated MP3 Playback, Servo Control, and Display
*
* This code interfaces with an LD2420 MMWave Sensor to detect motion. Upon
* detecting motion, it commands a DF Player Mini to play an MP3 file, controls
* an MG996R servo motor to rotate 45 degrees, and updates an SSD1306 I2C
* display. The system uses an Arduino Nano as the main controller.
*/
#include <SoftwareSerial.h>
//#include define<DFRobotDFPlayerMini.h>
the#include digital<Servo.h>
pins#include to<Wire.h>
use#include as RX and TX for two<Adafruit_SSD1306.h>
// softwarePin serialdefinitions
connections#define constSERVO_PIN intA7
RX1#define =DFPLAYER_RX_PIN 8;A2
const#define intDFPLAYER_TX_PIN TX1A3
=#define 9;SENSOR_PIN constA6
int#define RX2OLED_RESET =-1
10;#define constSCREEN_WIDTH int128
TX2#define =SCREEN_HEIGHT 11;64
// create SoftwareSerialCreate objects
SoftwareSerial SoftSerialOne(RX1,TX1)mySoftwareSerial(DFPLAYER_RX_PIN, DFPLAYER_TX_PIN);
SoftwareSerialDFRobotDFPlayerMini SoftSerialTwo(RX2,TX2)myDFPlayer;
Servo myServo;
Adafruit_SSD1306 display(SCREEN_WIDTH, SCREEN_HEIGHT, &Wire, OLED_RESET);
void setup(void)) {
// setup the softwareInitialize serial pinscommunication
mySoftwareSerial.begin(9600);
Serial.begin(9600);
// Initialize DFPlayer
if (!myDFPlayer.begin(mySoftwareSerial)) {
Serial.println("Unable to begin DFPlayer Mini");
while (true);
}
myDFPlayer.volume(20); // Set volume level (0-30)
// Initialize Servo
myServo.attach(SERVO_PIN);
myServo.write(0); // Set initial position
// Initialize sensor pin
pinMode(RX1,SENSOR_PIN, INPUT);
pinMode(RX2,// INPUT)Initialize display
if (!display.begin(SSD1306_I2C_ADDRESS, 0x3C)) {
Serial.println("SSD1306 allocation failed");
pinMode(TX1,for OUTPUT)(;;);
pinMode(TX2,}
OUTPUT)display.display();
delay(2000);
display.clearDisplay();
display.setTextSize(1);
display.setTextColor(SSD1306_WHITE);
display.setCursor(0, 0);
display.println("System Ready");
display.display();
}
void loop(void)) {
SoftSerialOne.begin(9600)// Check for motion detection
if (digitalRead(SENSOR_PIN) == HIGH) {
// Play MP3 file
myDFPlayer.play(1); // begin communication onPlay the first track
// softwareRotate serialservo channel45 SoftSerialOne.print("Hellodegrees
World")myServo.write(45);
delay(1000); // sendWait somethingfor SoftSerialOne.end(); // end communication on the first software
// serial channel
SoftSerialTwo.begin(9600); // begin communication on the1 second
// softwareReturn serialservo channelto SoftSerialTwo.print("Helloinitial World")position
myServo.write(0);
delay(1000); // sendWait somethingfor SoftSerialTwo.end();1 second
// endUpdate communicationdisplay
ondisplay.clearDisplay();
thedisplay.setCursor(0, second0);
softwaredisplay.println("Motion //Detected!");
serialdisplay.display();
channeldelay(2000);
display.clearDisplay();
display.setCursor(0, 0);
display.println("System Ready");
display.display();
}
}Basic Wiring